|
||||
|
Воздушно-орбитальная система «СПИРАЛЬ» Часть 2 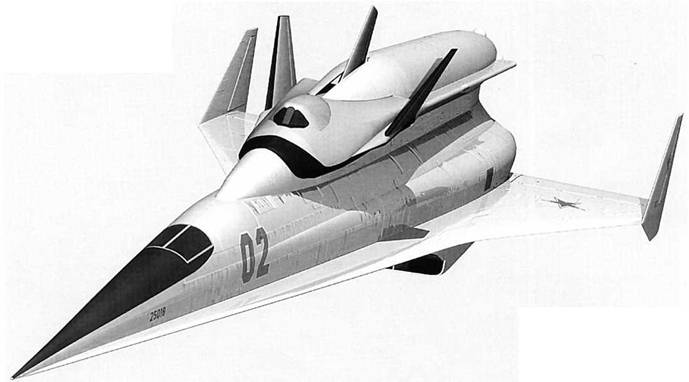 Лукашевич В.П. Труфакин В.А. Микоян С.А. ОРБИТАЛЬНЫЙ САМОЛЕТ На ранней стадии развития возвращаемых с орбиты маневренных гиперзвуковых летательных аппаратов наиболее приемлемыми в рамках существовавших технологий были конфигурации, обеспечивающие низкие уровни тепловых потоков к поверхности аппарата. Этому требованию удовлетворяли аэродинамические компоновки типа «несущий корпус». Существенно отличаясь от компоновки классических самолетных форм, аэродинамические компоновки типа «несущий корпус» потребовали проведения большого количества дополетных исследований не только при гиперзвуковых, но и при более низких (вплоть до посадочных) скоростях. Исследования аэродинамических несущих тел были начаты в 1965 г. в форме исследований конкретных компоновок орбитального самолета проекта «Спираль». Научно-исследовательские работы по теме «Спираль», проведенные в 1965-1976 годах, позволили решить целый ряд принципиальных задач по системе управления. Были сформулированы требования к аэродинамической компоновке орбитального самолета и системе аэродинамического и газодинамического управления, проанализированы траектории, области достижимости, режимы полета и возможные методы управления; сформулированы требования к аэродинамическому качеству орбитального самолета на всех режимах, в том числе бездвигательной посадке; выполнен большой обьем исследований по динамике и управлению орбитального самолета, включая исследования на специально созданном под этот проект в ЦАГИ пилотажном стенде МК-10, включающем в свой состав натурную головную часть аналога орбитального самолета. Эти исследования в значительной степени определили облик системы управления. Обьем исследований был значительно расширен после ввода в эксплуатацию в 1976 г. на базе Центра подготовки космонавтов (ЦПК) пило- тажно-исследовательского комплекса «Пилот-105» с задействованием в контур управления центрифуги ЦФ-7 (В.П.Найденов, А.В.Любимов). Уделяя основное внимание созданию орбитального самолета, конструкторы фактически предложили к разработке семейство летательных аппаратов, основанных на единой оригинальной аэродинамической компоновке и имеющих близкие размеры и массы. Создаваемые для разных целей и задач, внешне похожие аппараты должны были поэтапно, шаг за шагом, благодаря постепенному усложнению бортовых систем и расширению круга решаемых задач, приближать разработчиков к главной цели – семейству боевых орбитальных самолетов. Сначала предлагалось создать самолет-аналог («50-11») для гиперзвуковых суборбитальных «прыжков» в космос, затем – экспериментальный пилотируемый орбитальный самолет (ЭПОС) для демонстрации реализуемости проекта и отработать на нем основные этапы орбитального полета и посадки. Благодаря массо-габаритному сходству телеметрической аппаратуры и фотооборудования, ЭПОС можно было легко модифицировать в орбитальный фоторазведчик. И только потом должны были появиться боевые варианты орбитального самолета. При знакомстве с вариантами орбитального самолета мы также будем следовать логике разработчиков, т.е. сначала расскажем об основных характеристиках, одинаковых для всех аппаратов, затем подробнее остановимся на самолетеаналоге и детально рассмотрим конструкцию и функционирование ЭПОСа, и уже затем при описании боевых вариантов орбитального самолета уделим внимание только их основным отличиям от ЭПОСа. 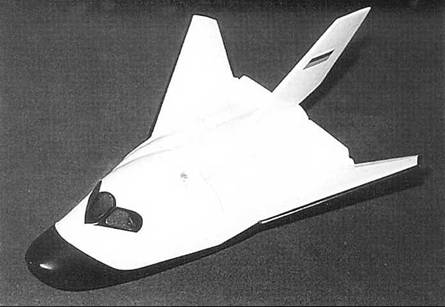 Модель орбитального самолета  Третий аппарат SV-5D (Х-23) в экспозиции музея ВВС США При выборе формы и размерности аппарата пришлось учитывать следующие требования: – температура внешних поверхностей самолета не должна превышать 1400 градусов С, т.к. эта температура являлась предельно-допустимой для единственного отработанного в то время конструкционного тугоплавкого материала; – температурные поля на основных поверхностях самолета должны были быть возможно более равномерными для максимального снижения температурных напряжений; – самолет должен при спуске с орбиты обладать запасом устойчивости, достаточным для полета на постоянном балансировочном угле атаки в диапазоне 45-65 градусов и минимальном (менее 5 градусов) угле скольжения, т.к. отклонения от этого диапазона углов атаки в большую или меньшую сторону и наличие углов скольжения (более 5 градусов) приводит к возрастанию температуры поверхности и увеличению градиентов температуры; посадка орбитального самолета не должно была отличаться от нормальной посадки современного самолета; – полезный объем самолета должен был быть возможно большим при минимальной омываемой площади его поверхности; – габариты самолета должны были обеспечивать запуск аппарата с помощью ракеты-носителя «Союз» без ее доработки. В результате получился летательный аппарат длиной 8 м и шириной плоского фюзеляжа в зоне крепления киля 4 м, выполненный по схеме «несущий корпус» и имеющий сильно затупленную оперенную треугольную форму в плане со стреловидностью 74 градуса. Выбор большой стреловидности корпуса обеспечивает равномерные температурные поля на нижней части. Ограничения, накладываемые условиями старта на РН «Союз», определили и площадь плановой проекции самолета – 24 м2 . Выбор облика орбитального самолета «Спираль» производился не совсем на пустом месте. Необходимо отметить, что при выборе компоновки и алгоритмов управления орбитального самолета «Спираль» наши конструкторы внимательно следили за американскими работами над исследовательскими беспилотными аппаратами ASV и AEV (6 успешных запусков на суборбитальные траектории с помощью баллистической РН «Тор» в период 1963-1965 годов), создававшимися в рамках программы ASSET. Аппараты имели форму полуконуса с треугольным крылом и испытывались на скоростях, близких к первой космической. Кстати, в рамках программы «ASSET 5» 8 декабря 1964 г. состоялся первый запуск масштабной модели ракетно-космического самолета «Дайна Сор». В этот день с мыса Канаверал был осуществлен пуск модели летательного аппарата по суборбитальной траектории с помощью баллистической ракеты «Тор». Цель пуска по суборбитальной траектории – изучение аэродинамического обтекания самолета при движении в верхних слоях атмосферы. Максимальная высота подъема макета составила 53 км. Целью программы ASSET было исследование аэротермодинамических характеристик, прочности и упругости конструкции. Дальнейшим продолжением работ стала программа START, предусматривавшая исследование вопросов входа в плотные слои атмосферы космических аппаратов, использующих подъемную силу. В рамках программы START исследования проводились по двум направлениям: – запуск беспилотных аппаратов SV-5D (подпрограмма PRJME), в период с 21 сентября 1966 по 19 апреля 1967 г. выполнено три запуска ракетой-носителем «Атлас» с авиабазы ВВС Ванденберг в Калифорнии. Достигнута максимальная высота полета 152,4 км и скорость 7,37 км/ сек. Первые два аппарата при входе в плотные слои атмосферы разрушились, третий аппарат вернулся благополучно; – исследование пилотируемых гиперзвуковых летательных аппаратов на малых скоростях полета (подпрограмма PJLOT). Подрограммой PJLOT, а также программой NASA MLBRP предусматривались летные исследования пилотируемых летательных аппаратов с несущим корпусом Х- 24А, Х-24В, M2-F1, M2-F2, HL-10 на дозвуковых и сверхзвуковых режимах полета. Целью испытаний являлось исследование ручного управления, обеспечение устойчивости и управляемости и горизонтальной посадки возвращаемых орбитальных самолетов с низким аэродинамическим качеством.  M2F-I в полете но привязи зо самолетом-буксировщиком, 1964 г.  M2-F2 на ВПП испытательного центра им. Драйдена, 1966 г.  M2F-3 на поверхности высохшего озера Роджерс, авиабаза Эдварде, 1970 г.  HL-10, на поверхности высохшего озера Роджерс, авиабаза Эдварде, 1968 г.  Х-24А, авиабаза Эдварде, 1967 г.  Х-24В, авиабаза Эдварде, 1972 г. К моменту выпуска в СССР аванпроекта «Спирали» в США уже проводились полеты пилотируемых аппаратов M2-F1 (всего было выполнено 100 полетов за самолетом-буксировщиком с последующей отцепкой на высоте 3600 м), M2-F2 (16 полетов) и HL-10 (24 полета). Разумеется, результаты этих испытаний, включая анализ причин аварии при посадке аппарата M2-F2, были известны в ОКБ Микояна. Но продолжим рассказ об орбитальном самолете «Спираль»… Носовое затупление выполнено в виде шестидесятиградусного сегмента с радиусом образующей сферы 1,5 м. На атмосферном участке спуска с орбиты на углах атаки самолета в диапазоне 45-65 градусов сегмент располагается под углом ±10 градусов к потоку. С учетом лучистого теплообмена с менее нагретой верхней обшивкой это обеспечивает максимальную температуру на носовом затуплении 1400 градусов С. Уменьшение влияния колебаний угла атаки на повышение температуры достигается выбором необходимого запаса устойчивости и автоматики, ограничивающих колебания по углам атаки и скольжения в пределах +10 и ±4 градуса соответственно. Нижняя поверхность самолета выполнена близкой к плоскости с малым радиусом скругления кромок. Плоская нижняя поверхность и расчетный по температуре диапазон углов атаки на спуске 45-65 градусов обеспечивают получение максимального коэффициента подъемной силы, а, следовательно, минимальную температуру поверхности. Интересная деталь: при расчете максимальных температур поверхности самолета на участке интенсивного торможения в атмосфере при спуске с орбиты не учитывались каталитические свойства поверхности и различия между ламинарным и турбулентным обтеканием набегающего потока – очевидно, по причине отсутствия надежных расчетных методик. Большие градиенты температур сосредоточены на радиусном переходе между нижней и боковой поверхностями, где применением специальных конструкций исключается появление больших температурных напряжений и коробления. Боковые поверхности корпуса выполнены в виде плоскостей, установленных под значительным отрицательным углом встречи с потоком для уменьшения тепловых потоков внутрь фюзеляжа. Форма верхней поверхности выбрана из условия получения потребных внутренних объемов, при этом обеспечено хорошее обтекание корпуса самолета на дозвуке. На гиперзвуке верхняя поверхность находится в затененной (срывной) зоне, что обеспечивает низкие температуры ее поверхности (менее 500 градусов С). Стреловидное крыло (55 градусов по передней кромке) самолета имеет V-образную форму. Консоли крыла (площадь каждой 33 м 2 ) с размещенными на них элевонами выполнены поворотными (отклоняющимися вверх) для исключения их прямого обтекания тепловым потоком при прохождении участка плазмообразо- вания. Угол подъема консолей, измеряемый от горизонтальной плоскости, мог варьироваться от 115 градусов (25 градусов «внутрь» от вертикального положения консолей) при старте на РН «Союз» для компактного размещения под головным обтекателем РН до промежуточных положений в 60-45 градусов (от горизонтали) на этапе интенсивного торможения (нагрева). Положение и форма консолей выбраны так, чтобы при спуске с орбиты самолет самобалансировался в расчетном по температуре диапазоне углов атаки (45-65 градусов) при гиперзвуковом качестве 0,8-0,9 и при обтекании самолета на этих углах атаки поток стекал с корпуса на крыло, а не набегал на его передние кромки. Это должно было обеспечить низкий уровень температур на консолях при оптимальных значениях гиперзвукового аэродинамического качества. Одновременно положение консолей крыла 45 градусов обеспечивает необходимый запас боковой динамической устойчивости в связи с неэффективным вертикальным оперением (килем с рулем направления) на указанных режимах полета. Расчетная схема обтекания крыла и корпуса была подтверждена продувками масштабной модели в аэродинамических трубах ЦАГИ. Силовая ферма фюзеляжа орбитального самолета 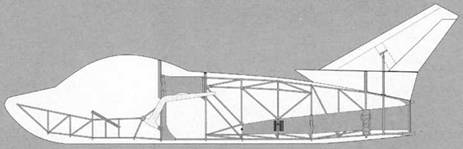 Ферма фюзепяжа Вид снизу 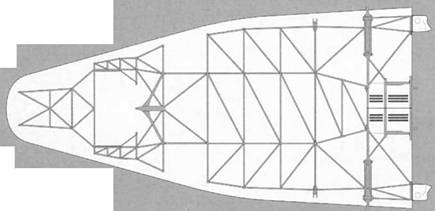  Ферма фюзепяжа Вид сверху 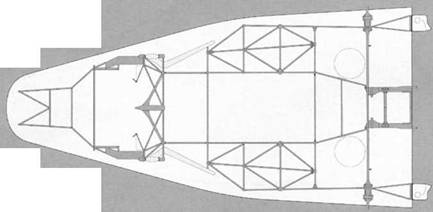 Чтобы улучшить посадочные характеристики, на последнем, атмосферном, участке спуска была предусмотрена перебалансировка аппарата на малые углы атаки с максимальным раскладыванием консолей в фиксированное крыльевое положение (до 30 градусов), при этом размах крыла достигал 7,4 м. Таким образом, благодаря выбранной аэродинамической компоновке, из общего размаха на стреловидные консоли крыла приходилось лишь 3,4 м, а остальная, большая часть несущей поверхности соотносилась с шириной фюзеляжа. Хорошее обтекание самолета на дозвуковых скоростях позволило получить аэродинамическое качество К=4,5 и коэффициент подъемной силы 0,6-0,8, что при выбранной удельной нагрузке 190 кг/м2 обеспечивало посадочную скорость, не превышающую 250 км/час, как и у обычных скоростных самолетов. Путевую устойчивость обеспечивал киль (стреловидность по передней кромке 60 градусов), оснащенный рулем направления. Высота самолета при сложенном крыле составляла 2,5 м. В большинстве публикаций о «Спирали» говорится о возможности раздельного изменения угла поперечного V для каждой консоли с целью управления орбитальным самолетом по крену на участке атмосферного спуска. Это распространенное заблуждение о способе управления по крену для всех вариантов орбитального самолета «Спирали» впоследствии распространилось и на орбитальный самолет, прорабатывавшийся в рамках проекта создания Многоцелевой авиационно-космической системы (МАКС). И хотя на самом деле раздельное изменение угла поперечного V не использовалось, «нет дыма без огня»… Введение на орбитальном самолете поворотных консолей крыла с расположением на них элевонов для управления по тангажу и крену выявило проблему обеспечения поперечного управления (по крену) на сверх- и гиперзвуковых режимах движения. Суть этой проблемы в следующем. В посадочной конфигурации, когда консоли крыла разложены, т.е. находятся в «самолетном» положении, схема управления креном с помощью элевонов ничем не отличается от обычного поперечного управления самолетов нормальных схем с помощью элеронов: когда летчик отклоняет ручку управления (штурвал) вправо, то самолет кренится на правое крыло, и наоборот. На сверх- и гиперзвуковых скоростях полета, когда консоли крыла орбитального самолета приведены в положение 60-45 градусов от горизонтали (30-45 градусов от плоскости симметрии), элевоны, расположенные на них, сохраняют свои функции как орган управления по тангажу, но дают обратную реакцию орбитального самолета по крену. В этом случае, если летчик отклоняет ручку управления вправо, то ОС кренится влево, и наоборот. Такая смена реакции по крену при изменении геометрии (раскладывании консолей крыла) орбитального самолета является совершенно неприемлемой для летчика. Следует отметить, что на этапе спуска орбитального самолета с орбиты (участок полета с гиперзвуковыми и сверхзвуковыми скоростями) летчик управляет только углами атаки (тангажом) и крена, а управление траекторией движения в боковой плоскости происходит за счет подъемной силы при создании крена того или иного знака. Таким образом, формирование надежной системы управления креном на указанных режимах имело принципиальное значение. Наличие обратной реакции по крену на высоких скоростях при «недоразложенных» консолях крыла выяснилось в октябре 1967 года, о чем сразу было доложено Владимиром Александровичем Тру- факиным Лозино-Лозинскому, Как позднее вспоминал Владимир Александрович, ему показалось, что в первоначальный момент Главный конструктор не сразу доверился «фантазиям» молодого специалиста, но уже через 2-3 недели он организовал серьезное обсуждение поставленной проблемы, на котором предложил организовать схему управления креном с помощью дифференциального отклонения консолей крыла. Однако после соответствующих проработок этот вариант отпал, прежде всего, из-за малого быстродействия поперечного управления по указанной схеме – максимальная скорость отклонения консоли не превышала 5 угловых градусов в секунду, что было совершенно недостаточно. В процессе поисков были предложены и разработаны принципиально новые бесшарнирные органы управления – верхние и нижние интерцепторы, но и они не решали рассматриваемой проблемы. 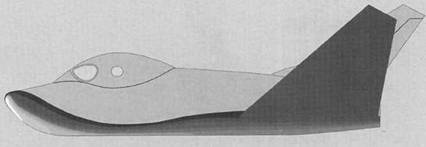 Распределение температур но поверхности орбитального самолета при спуске в атмосфере  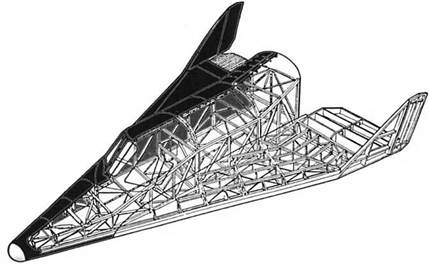 X-20 DYNA-SOAR Основа конструктивно-силовой схемы американского аппарата Х~20 – пространственная ферма с прикрепленными листами обшивки и теплозащитными экранами В конце концов, в ЦАГИ Р.В.Студ- нев предложил не бороться с обратной реакцией, а использовать ее. Были предложены схемы изменения знака сигнала с ручки управления при изменении геометрии крыльев орбитального самолета. Для этого пришлось разработать специальные алгоритмы обеспечения устойчивости и управляемости с коммутацией величин настроечных коэффициентов в зависимости от положения консолей крыла. В дальнейшем такое управление получило название «обобщенное поперечное управление» и в 1969 г. было защищено авторским свидетельством. Разработанный способ управления впоследствии был использован на «Буране» (на нем также на гиперзвуковых скоростях наблюдалось явление обратной реакции элевонов по крену). Проблема была решена, но расхожее ошибочное мнение об управлении по крену на орбитальном самолете «Спираль» осталось. При решении проблемы теплозащиты орбитального самодэта:проектанты взяли за основу принцип «горячей конструкции оболочки» с максимальной температурой около 1500 градусов С, т.е. конструкции, охлаждаемой только за счет лучистого теп- лопереноса от горячих элементов к более холодным. При таком подходе все конструктивные решения сведены только к взаимному тепловому экранированию элементов конструкции без применения каких-либо других конструктивных решений по активному охлаждению. Тем не менее в заключении ЦАГИ по аванпроекту рекомендовано в дальнейшем, в ходе эскизного проектирования, рассмотреть возможность применения, помимо «горячей», и частично охлаждаемой конструкции. Основой конструктивно-силовой схемы орбитального самолета является силовая пространственная ферма, сваренная из отдельных трубчатых стержней-звеньев, на которой закреплены все агрегаты и на которую замыкаются все виды нагрузок, приходящие на фюзеляж. Наличие фермы позволяет в полной мере реализовать принцип «горячей конструкции» с минимизацией внутренних тепловых напряжений и вызываемых ими короблений несущих элементов конструкции. В то же время ферма позволяет значительно снизить внутренние тепловые потоки в силовой конструкции по сравнению с традиционной силовой схемой. Для сравнения скажем, что в основу конструктивно-силовой схемы проектировавшегося по аналогичному принципу «горячей конструкции» ракетоплана «Дайна-Сор» также закладывалась пространственная ферма. В то же время для американских шаттлов и советского «Бурана», защищенных поверхностной плиточной теплозащитой, при выборе конструктивно- силовой схемы использованы традиционные конструкторские решения с использованием шпангоутов, лонжеронов и силовых панелей обшивки. Снизу, в наиболее теплонапряжен- ной части корпуса орбитального самолета, к ферме крепится нижний силовой теплозащитный экран (ТЗЭ), воспринимающий местные аэродинамические нагрузки и предохраняющий внутренний силовой набор от воздействия высоких температур. Экран состоял из следующих частей: – основной части с теплоизоляцией, расположенной под всеми агрегатами самолета; – носовой части без теплоизоляции, имеющей возможность свободного лучистого теплообмена с менее нагретой верхней обшивкой, за счет чего температура экрана в зоне максимальной температуры снижалась с 1600 градусов С до 1400 градусов С; – воспринимающего перепад температур до 1000 градусов С за счет упругих деформаций гофра. Экран крепился на керамических шарнирных подвесках-подшипниках, выполнявших роль тепловых барьеров и обеспечивавших подвижность ТЗЭ относительно основной конструкции. Такая подвеска ТЗЭ не только снимала температурные напряжения, возникающие за счет разности температур между экраном и основной конструкцией, достигающей 800- 1000 градусов С, но и обеспечивала неизменность внешних обводов за счет сохранения формы и положения экрана относительно корпуса. Конструктивно ТЗЭ выполнялся из множества металлических пластин- панелей из плакированного ниобие- вого сплава, расположенных по принципу «рыбной чешуи». Сверху корпус закрывался панелями обшивки, также подвижными (для снятия температурных напряжений) за счет отверстий большого диаметра, превышающих диаметр рабочей зоны крепежных элементов. Проведенные при разработке аванпроекта расчеты по флаттеру показали, что критические скоростные напоры классических форм флаттера крыла и киля орбитального самолета достаточно высоки, безопасность от рулевых форм флаттера обеспечивается весовой балансировкой. Расчеты также подтвердили безопасность панелей теплозащитного экрана от флаттера. Анализ показывал, что и критический скоростной напор дивергенции корпуса орбитального самолета был существенно выше эксплуатационного, а влияние упругости крыла на эффективность элеронов незначительно. Штатная посадка осуществлялась на 4-х стоечное лыжное шасси (с тарельчатыми опорами), убираемое в боковые ниши корпуса (передние опоры) и в донный срез фюзеляжа (задние опоры). Лыжное шасси скомпоновано таким образом, чтобы в убранном положении оно находилось в зоне низких температур под защитой экрана (поэтому оно было выполнено из «обычной» стали ВЛ-1) и не разрезало экран при выпуске перед 'посадкой. Стойки шасси были оборудованы металлическими тарельчатыми опорами (лыжами) из износостойкого металла – местные температуры из-за принятой концепции «горячей конструкции» не позволяли применить резиновые пневматики. Проходимость широко расставленных стоек шасси должна была обеспечить посадку практически на любой более или менее ровный грунт минимальной прочности около 4 кг/ см2 с обеспечением хорошей устойчивости при коротком пробеге. Для упрощения и облегчения шасси предусматривался только его выпуск, уборка должна была производиться наземными средствами при подготовке к пуску. Выбор, испытания и отработка конструкционных материалов для аппарата, спроектированного по идеологии «горячей конструкции», оказались непростым делом и осуществлялись в лабораториях Всесоюзного научно-исследовательского института авиационных материалов (ВИАМ) по температурным условиям, заданным ОКБ-155. Но и это еще не все (что интересно!) – в разделе аванпроекта «Конструкция самолета и применяемые материалы» на 21 странице читаем: «…жаростойкие теплозащитные материалы типа пенокерамик в настоящее время разрабатываются». Обратите внимание на эту уникальную фразу! «Горячая» конструкция на ОС «Спираль» применена не потому, что она лучше, а потому что ничего другого в многоразовом исполнении на тот момент еще просто не существовало… Но уже тогда конструкторы думали о сверхлегком керамическом теплозащитном покрытии! Напомним – документ датирован 29 июня 1966 г. ~ до первого полета американского шаттла «Колумбия» с плиточной керамической теплозащитой оставалось еще почти 15 лет, до первого испытания советских кварцевых плиток на «БОРе-4» – 16 лет, до полета «Бурана» – еще долгие 22 года! Но пока расскажем о первом аппарате, который должен был стать нашим ответом американскому ракетоплану X- 15. СУБОРБИТАЛЬНЫЙ ПИЛОТИРУЕМЫЙ САМОЛЕТ-АНАЛОГ («50-11») Для отработки посадки, бортовых систем, аэродинамики, газодинамического управления и всех систем управления самолетом, а также для тренировки летного состава предполагалась разработка аналога орбитального самолета, точно повторяющего его форму. Такой аналог, сбрасываемый с самолета-носителя Ту-95КМ, с помощью собственных двигателей должен был продолжить полет и позволить отработать условия посадки и полетов до М=6-8 и Н-50-120 км. Так как скорость полета в верхних слоях атмосферы у аналога была в несколько раз меньше орбитальной, то, учитывая щадящие температурные условия, его планировалось построить из обычных конструкционных материалов (стальные, титановые и алюминиевые сплавы). По проекту аналог оснащался силовой установкой, состоящей из двух серийных ЖРД разработки ОКБ-117 с тягой по 11,75 тс каждый (по другим данным, тяга каждого двигателя 13 тс) и одним ТРД 36-35 ОКБ-36 со стендовой тягой 2500 кг и уже существующим оборудованием (на первых экземплярах). ЖРД располагались с углом полуразвала 11 градусов 40 минут в горизонтальной плоскости таким образом, чтобы вектора их тяг проходили через центр масс аппарата. Использование освоенных в производстве агрегатов должно было значительно снизить стоимость и сроки отработки экспериментального орбитального самолета. В дальнейшем планировалось установить на аналог разработанные в ОКБ-2 МАП ускорители, позволяющие довести его скорость до М=12-13, и ряд штатных систем ЭПОСа. Самолет аналог 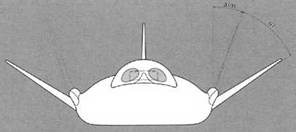 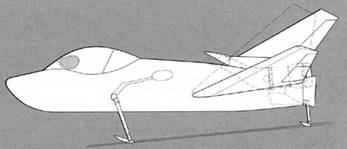 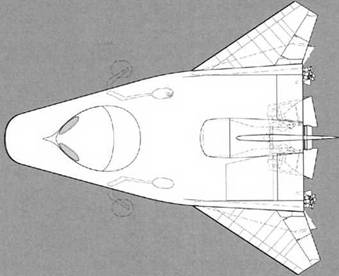 Подвеска аналога 50-11 под самолет-носитель Ту-95 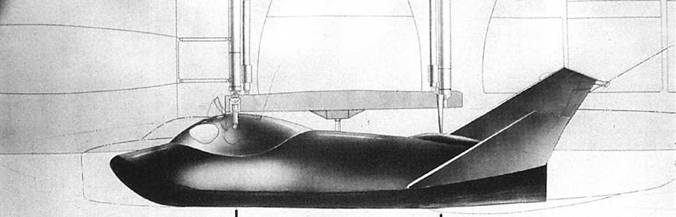 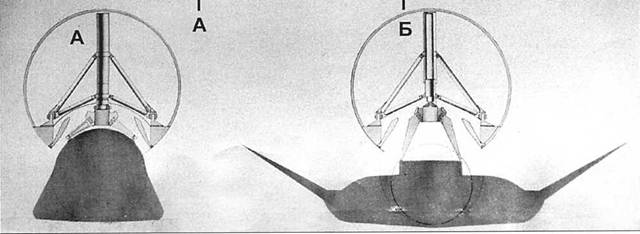 Схемо подвески аналога под самолетом-носителем соответствовала подвеске принятой на вооружение крылатой ракеты Х-20, поэтому доработка Ту-95КМ также не требовалась. Планировавшийся профиль полета выглядел следующим образом. После совместного взлета самолет- носитель Ту-95 в течение часа поднимает аналог на высоту 11-12 км, где на скорости 830 км/час происходит его сброс. Угол установки подвижных консолей крыла в начале полета составляет 20-35 градусов (соответственно 70-55 градусов от горизонтальной плоскости). Включив собственные маршевые ЖРД (под запас топлива 7,15 т использованы все свободные внутренние объемы планера), самолет-аналог через 81 секунду разгоняется до скорости 8000 км/час. Активный участок раз гона заканчивается на высоте 48-50 км. К этому моменту два ЖРД успевают сжечь 6625 кг топлива. В ходе дальнейшего полета, проходящего по инерции, аналог достигает максимальной высоты 120 км, имея в этот момент скорость 6800 км/час (М=7,5). В восходящей точке своей траектории аппарат может выполнять маневры с помощью двух ЖРД суммарной тягой 1,5 т и двигателей ориентации (системы газодинамического управления). Вход в атмосферу происходит на скорости 7250 км/час, максимальная перегрузка на этапе спуска достигает 5,3 д. Максимальное качество аппарата на гиперзвуковых скоростях 1,4, балансировочное – 1,0. В наиболее теплонапряженных местах обшивка успевает нагреться до 890 градусов С. После возвращения в плотные слои атмосферы, при уменьшении скорости полета до М=2,5, консоли крыла раскладываются в положение 60 градусов, и в диапазоне высот 5- 10 км включается ТРД тягой 2,5 т, который при запасе топлива 300 кг может обеспечить дальность полета до 90 км при крейсерской скорости 400 км/час на высоте 500±2000 м. Имея максимальное дозвуковое качество 4,5, аналог осуществляет переход на крейсерский режим полета с углом наклона траектории планирования 12 градусов и вертикальной скоростью около 18 м/сек. Посадочная глиссада имеет наклон 18 градусов, ( качество изза выпущенного шасси уменьшается до 4), посадочная скорость 250 км/час. При посадочной массе аппарата 4,4 т длина пробега составляет около 1000-1100 м. Программа создания суборбитального пилотируемого аналога «50 11» так и не была реализована в задуманных объемах, но проработанные конструкторские решения по сбросу с самолета-носителя Ту- 95КМ были востребованы при постройке и испытаниях дозвукового аналога «105.11». Но об этом мы расскажем чуть позже. РАЗМЕРНОСТИ САМОЛЕТА-АНАЛОГА «50-11» Длина, мм……………………………………………………………………. 8000 Размах по заднему торцу, мм……………………………………. 4000 Радиус носка корпуса, мм…………………………………………. ' 500 Площадь плановой проекции, м…………………………………. 2 24 Мидель корпуса, м2 ……………………………………………………… 3,70 Стреловидность носовой части, град………………………. 74,33 Стреловидность крыла по передней кромке, град………. 55 (Продолжение следует) Владимир Котельников, Михаил НИКОЛЬСКИЙ |
|
|||
|
Главная | В избранное | Наш E-MAIL | Добавить материал | Нашёл ошибку | Наверх |
||||
|
|
||||